为了保护自己免受天敌的侵害,食草动物一出生就站起来,并在数小时后开始行走。 Google正在开发一种AI机器人,该机器人可以唤醒并通过自我学习开始行走,而无需借力。以自动驾驶汽车为代表的自动机器已经接近实际使用的阶段,但是他们使用的AI则使用了他们事先学习的知识。另一方面,在没有任何人帮助的情况下自行学习行为模式的算法尚未普及。 Google研究小组正致力于通过一个新项目开发具有这种自学习能力的机器人。
据说四足机器人可以在2到3个小时之内不知不觉地向前和向后行走,并学会左右改变方向。 Google团队的机器人技术在一年前发现了一种方法,可以通过调整现有算法来进行学习。
在进行机器人强化学习时,我经常使用的方法是在计算机上建模虚拟环境,将虚拟机器人移至那里进行一定程度的学习,然后将其转换为真实的机器人算法。因此,可以减少物理破坏原型阶段机器人的可能性。由于这只是一个虚拟环境,因此很难像真实的自然环境一样重现斜坡,不平坦的地面,沙地等,因此在训练AI的阶段要花费大量的精力和时间是很困难的。
从一开始,研究团队就在实际环境中训练了机器人算法。该算法已得到改进,因此您可以以更少的尝试和失败来有效地学习。结果,该机器人能够站立并在两个小时内走动,并且对变形环境(例如物理阶梯和不平坦的斜坡)的响应速度更快。但是,在地形复杂的情况下,据说不同于起身和步行,有必要多次充当人类保姆。
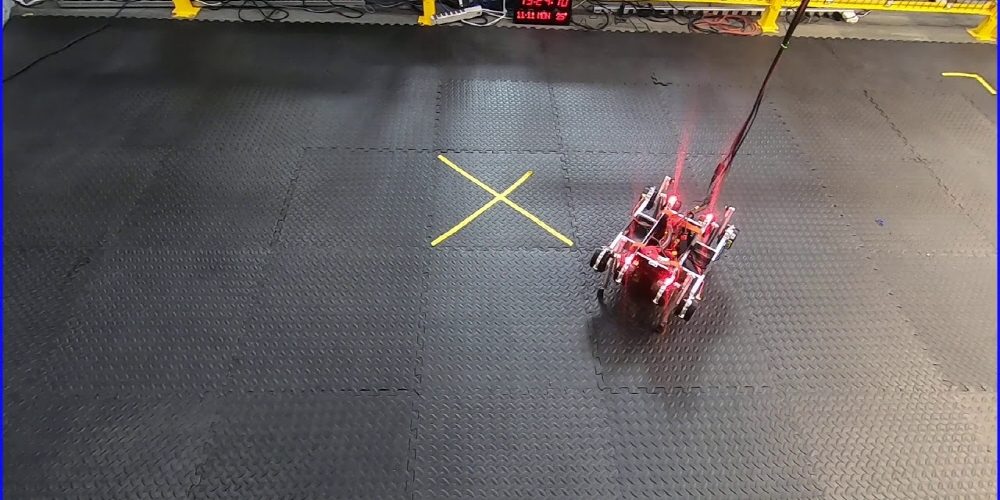
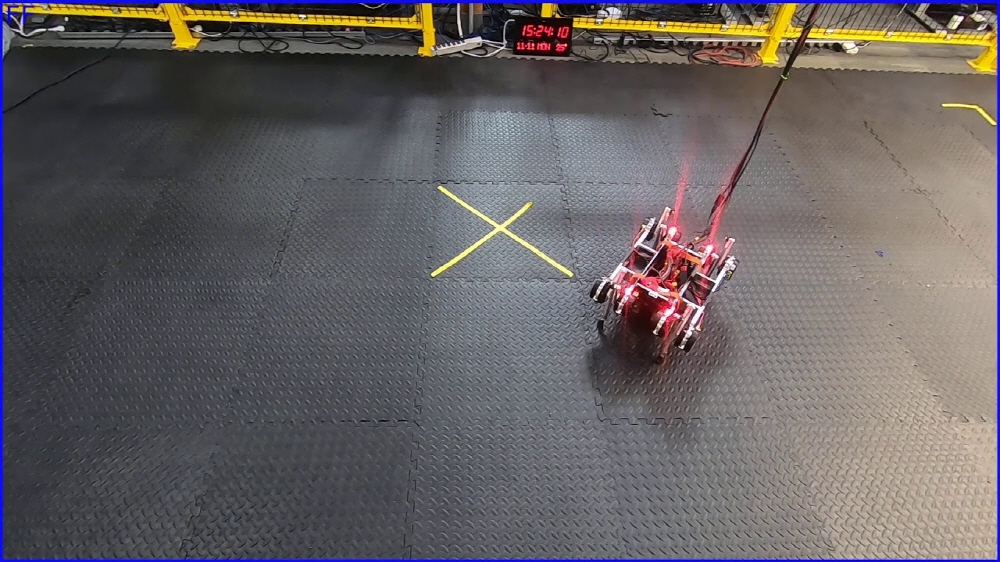
因此,研究团队创建了一个被墙壁包围的模型花园,以便该机器人可以一次学习在多种类型的地形上行走。当机器人被墙壁挡住时,它会改变方向并重新开始行走,从而提高了学习效率。
此外,还添加了硬编码算法,以使机器人在翻倒时能够再次站立,因为它可能会在第一次尝试在未知地形上动作时失败。由于增加了这些调整,机器人最终学会了如何自主行走,并学习了从平坦的地面到垫子上有很多缝隙的垫子的各种地面,而无需人工干预。这是将来使机器人更加方便的重要里程碑。但是,机器人当前使用的运动捕捉系统使用标记的对象来了解地形,这不能应用于现实世界。
尽管如此,研究团队仍打算通过将通过研究获得的新算法应用于各种机器人来积累将在各个领域活跃的机器人技术知识。我们所知道的大多数环境都是由人类构建的,人类会走路。因此,研究团队进行研究的原因是,机器人必须用双腿行走在人类世界中。相关信息可以在这里找到。












Add comment