当地时间10月18日,人工智能开发公司DeepMind宣布收购MuJoCo。多关节动力学与接触。由于合并,Musoco 可供任何人免费下载。
Muzocco 是一个适用于多关节动力学模拟的物理引擎。 Musoco 由华盛顿大学移动控制实验室 Emo Todorov 开发,自 2015 年起通过 Roboti 付费商业化,但根据合并,可以在 Apache License 2.0 下免费下载。
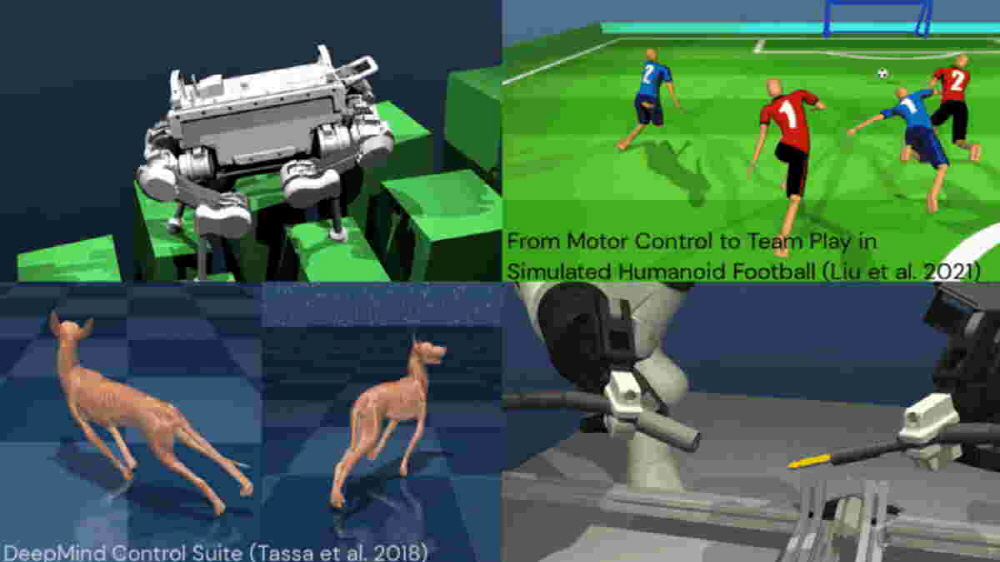
现实世界中会发生许多接触,例如走路时脚接触地面,书写时笔和手接触。然而,随着接触物体的柔软度、粘度和弹性等因素的变化,计算机模拟成为一项复杂的任务。 Mujoko 复制各种接触并且效率高,是机器人研究人员的重要选择,DeepMind 表示它收购并释放了 Musoko 以支持此类研究。此外,Deepmine 机器人团队使用 Musoco 已经很长时间了,未来将在与社区合作的同时,继续通过开源软件对其进行改进。
2021 年 1 月发表的一项检查机器人模拟使用的研究强调了开源工具在推进研究中的重要性。论文作者建议为被认证为开发和验证开源模拟平台的模型构建一个基于社区的开放库,DeepMind 根据建议开发和维护 Musoco 作为基于开源社区的项目。相关信息可以在这里找到。












Add comment