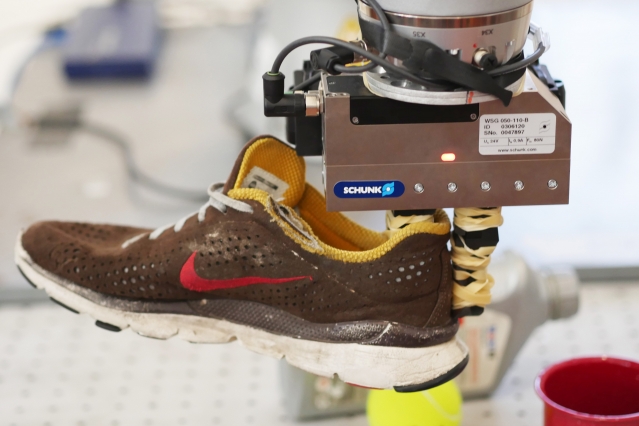
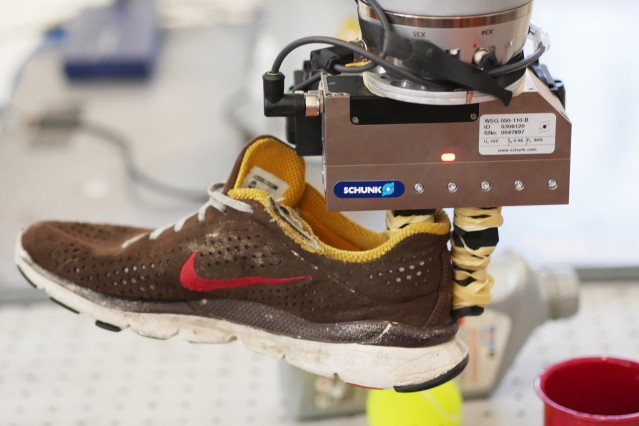
麻省理工学院计算机和人工智能研究所CSAIL(计算机科学与人工智能实验室)正在使用DON(密集对象网)神经网络研究视觉信息对象的视觉路线图。构建视觉路线图大约需要20分钟。从各个角度查看对象时选择对象的点。基于此,识别3D对象。
当机器人学习一个东西然后一个人谈论某一点时,机器人会处理其余的事情。通过这个实验,机器人成功地举起了第一双鞋和娃娃。在未来,预计机器人手臂将能够在没有人帮助的情况下识别和处理物体。
对计算机视觉的研究已经存在了几十年。然而,这是神经网络在3D中学习对象的新尝试。让事情变得简单,但这是你需要了解的关于机器人的更复杂的事情之一。如果这项研究继续下去,有一天,机器人能够像人类一样实时识别事物。
该团队将在联合机器人大会上宣布该项目的成果。有关更多信息,请单击此处 。












Add comment