
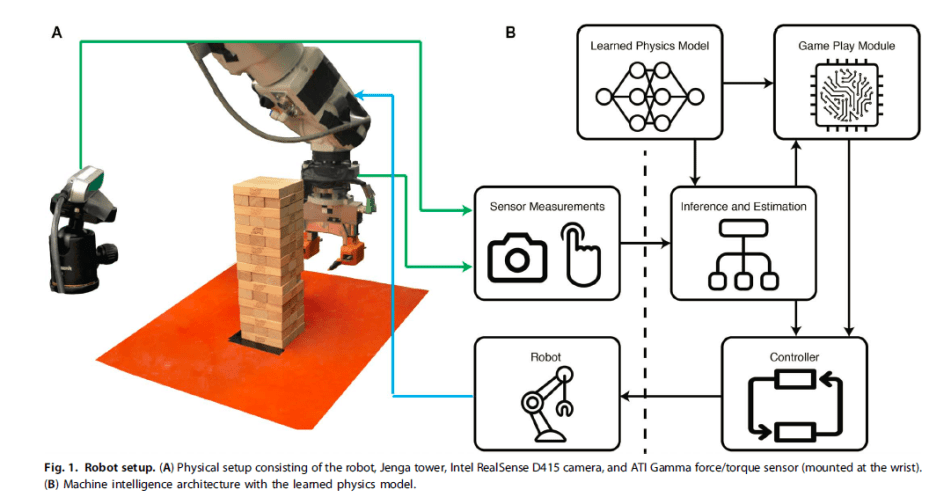
麻省理工学院的研究人员开发了一种机器人,学习使用人类视觉和触觉反馈学习Jenga,如触觉反馈。机器人手指可以感知阻挡摩擦和运动。
视觉数据对机器人很重要。相机在确定Jenga塔的形状和位置方面起着重要作用。但是这项研究最令人印象深刻的是机器人本身可以感受到机器人本身的触觉,而不是它的播放方式,块运动或相互作用。它学习如何在彼此之上进行游戏,以便您可以识别出各个棋块之间的游戏,并保持平衡。通过100多个游戏了解如何玩游戏。
这项研究的原因是工厂使用的机器人现在被编程为仅执行某些行为或行为。这种机器人臂有助于提高工作效率,但每项工作都需要增加成本,例如机器人。但是如果你只能用一个多任务呢?当机器人通过视觉和触觉反馈与周围世界相互作用时,机器人将能够学习如何使用力,例如重力和摩擦力,以便它可以用作多功能机器人。欲了解更多信息,请点击这里 。












Add comment